
外部设备为CPU提供存储、网络等多种服务,是计算机系统中除运算功能之外最为重要的功能载体。CPU与外设之间通过某种协议传递命令和执行结果;virtio协议最初是为虚拟机外设而设计的IO协议,但是随着应用范围逐步扩展到物理机外设,virtio协议正朝着更适合物理机使用的方向而演进。
virtio设备运行原理
一、抽象原理
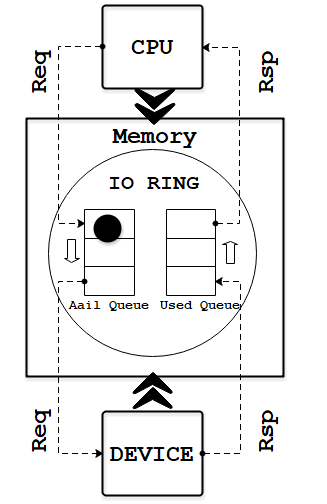
对于采用virtio协议进行通信的CPU和外设,其抽象原理如下图所示。CPU与外设可以共同访问内存(例如外设以DMA方式访问内存);内存中存在一个称为环形队列(IO RING)的数据结构,根据存放对象不同,该队列可分成由IO请求组成的请求队列(Avail Queue)和由IO响应组成的响应队列(Used Queue)。一个IO的处理过程可以分成如下四步:
- 第一步,应用程序下发IO时,CPU将IO请求放入环形结构(IO RING)的请求队列(Avail Queue)中并通知设备;
- 第二步,设备收到通知后从请求队列中取出IO请求并在内部进行实际处理;
- 第三步,设备将IO处理完成后,将结果作为IO响应放入响应队列(Used Queue)并以中断通知CPU;
- 第四步,CPU从响应队列中取出IO处理结果并返回给应用程序。
二、总线协议
virtio协议实现过程中,CPU与外设之间的通知机制以及外设访问内存方式由实际连接CPU与外设的总线协议决定,如下图所示。换句话说,virtio协议可以基于多种不同的总线协议来实现。虚拟化场景中,主要采用PCI总线协议和MMIO总线协议:采用PCI总线协议的virtio设备叫virtio-pci设备,它可以支持virtio设备的热插拔特性(基于PCI总线的设备热插拔机制),并可应用于真实物理外设;采用mmio总线协议的virito设备叫virito-mmio设备,它完全是针对虚拟机设计的,是一种轻量的虚拟总线机制,支持快速设备发现,但是无法使用在真实物理外设中。

三、队列结构与操作
抛开总线协议所决定的通知机制及访存方式,virtio协议定义了明确的队列结构及操作流程。下面我们以virito-blk块设备为例来进一步分析。
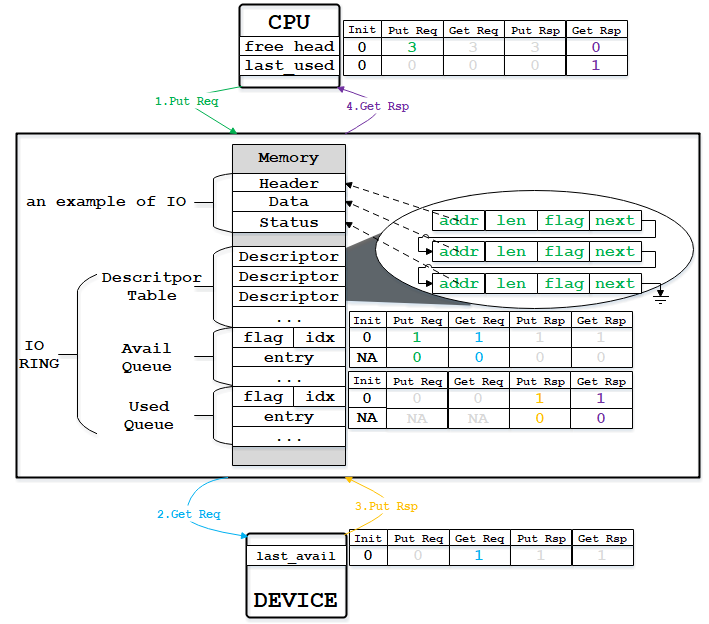
virtio-blk是一种存储设备,CPU发起的IO请求包含操作类型(读或写)、起始扇区(一个扇区为512节节,是块设备的存储单位)、内存地址、访问长度;请求处理完成后返回的IO响应仅包含结果状态(成功或失败)。如下示例图中,系统产生了一个IO请求(an example of IO),它在内存上的数据结构分为三个部分:Header,即请求头部,包含操作类型和起始扇区;Data,即数据区,包含地址和长度;Status,即结果状态。
virtio-blk设备使用一个环形队列结构(IO RING),它由三段连续内存组成:Descriptor Table、Avail Queue和Used Queue:
- Descriptor Table由固定长度(16字节)的Descriptor组成,其个数等于环形队列(IO RING)长度,其中每个Descriptor包含四个域:addr代表某段内存的起始地址,长度为8个字节;len代表某段内存的长度,本身占用4个字节(因此代表的内存段最大为4GB);flags代表内存段读写属性等,长度为2个字节;next代表下一个内存段对应的Descpriptor在Descriptor Table中的索引,因此通过next字段可以将一个请求对应的多个内存段连接成链表。
- Avail Queue由头部的flags和idx域及entry数组(entry代表数组元素)组成:flags与通知机制相关;idx代表最新放入IO请求的编号,从零开始单调递增,将其对队列长度取余即可得该IO请求在entry数组中的索引;entry数组元素用来存放IO请求占用的首个Descriptor在Descriptor Table中的索引,数组长度等于环形队列长度(不开启event_idx特性)。
- Used Queue由头部的flags和idx域及entry数组(entry代表数组元素)组成:flags与通知机制相关;idx代表最新放入IO响应的编号,从零开始单调递增,将其对队列长度取余即可得该IO响应在entry数组中的索引;entry数组元素主要用来存放IO响应占用的首个Descriptor在Descriptor Table中的索引(还有一个len域,virtio-blk并不使用), 数组长度等于环形队列长度(不开启event_idx特性)。
- 环形队列结构(IO RING)被CPU和设备同见。仅CPU可见变量为free_head(空闲Descriptor链表头,初始时所有Descriptor通过next指针依次相连形成空闲链表)和last_used(当前已取的used元素位置)。仅设备可见变量为last_avail(当前已取的avail元素位置)。
针对示例图中的IO请求,处理流程分析如下:
- 第一步,CPU放请求。由于示例IO请求在内存中由Header、Data和Status三段内存组成,因此要从Descriptor Table中申请三个空闲项,每项指向一段内存,并将三段内存连接成链表。这里假设我们申请到了前三个Descriptor(free_head更新为3,表示下一个空闲项从索引3开始,因为0、1、2已被占用),那么会将第一个Descriptor的索引值0填入Aail Queue的第一个entry中,并将idx更新为1,代表放入1个请求;
- 第二步,设备取请求。设备收到通知后,通过比较设备内部的last_avail(初始为0)和Avail Queue中的idx(当前为1)判断是否有新的请求待处理(如果last_vail小于Avail Queue中的idx,则有新请求)。如果有,则取出请求(更新last_avail为1 )并以entry的值为索引从Descriptor Table中找到请求对应的所有Descriptor来获知完整的请求信息。
- 第三步,设备放响应。设备完成IO处理后(包括更新Status内存段内容),将已完成IO的Descriptor Table索引放入Used Queue对应的entry中,并将idx更新为1,代表放入1个响应;
- 第四步,CPU取响应。CPU收到中断后,通过比较内部的last_used(初始化0)和Used Queue中的idx(当前为1)判断是否有新的响应(逻辑类似Avail Queue)。如果有,则取出响应(更新last_used为1)并将Status中断的结果返回应用,最后将完成响应对应的三项Descriptor以链表方式插入到free_head头部。
四、virtio-mmio后端代码解析
完成virtio队列结构和操作流程分析后,我们可以结合virtio-mmio后端代码来进一步加深理解。在收到前端CPU的通知后(后续讨论mmio总线时将分析该通知过程),fc_vmm线程将对IO进行处理,核心处理函数为handle_event:
firecracker/devices/src/virtio/block.rs:
impl EpollHandler for BlockEpollHandler { // EpollHandler是代表Epoll事件循环框架中的事件处理方法的一个trait。
// Traint是Rust语言中对相同行为进行抽象的一种方式,是一组公共函数的集合
fn handle_event( // EpollHandler这个trait只定义了一个函数handle_event,实现对具体Epoll事件
// 的处理功能
&mut self,
device_event: DeviceEvent, // device_event代表事件类别,这里为QUEUE_AVAIL_EVENT,即对virtio的avail
// queue中的请求进行处理;另一个类别为RATE_LIMITER_EVENT,与QoS限速有关,
// 这里暂不作讨论
...
) -> result::Result<(), DeviceError> {
match device_event {
QUEUE_AVAIL_EVENT => { // 对avail queue进行处理
...
if let Err(e) = self.queue_evt_read(){ // self.queue_evt为向Epoll事件循环框架中注册的句柄,调用read函数读取句柄内容
// 后便可再次触发事件
...
} else if !self.rate_limiter.is_blocked() && self.process_queue(0){ // self.rate_limiter.is_blocked()用来判定是否达到上限限制。如果没有超过上限,则
// 调用process_queue()对ID为0的virtio队列进行请求处理。firecracker实现的
// virtio-blk只支持单队列,所以这里仅处理0号队列。process_queue的内部实现我
// 们将在下面分析,总的来说,该函数实现了virito抽象原理中描述的第二步和第三步
self.signal_used_queue() // 向前端CPU发送中断通知
} else {
Ok(())
}
}
...
}
}
}
pub struct BlockEpollHandler { // BlockEpollHandler结构包含virtio-blk后端和事件处理相关的所有对象和方法
queue: Vec<Queue>, // virtio-blk设备包含的所有virtio队列,这里只有一个
mem: GuestMemory, // 虚拟机内存对象,已经映射到firecracker用户态空间,可直接访问
disk_image: File, // virtio-blk设备对应的后端文件,实际的存储点
disk_nsectors: u64, // virtio-blk设备大小,以扇区为单位
...
interrupt_evt: EventFd, // virtio队列对应的irq_fd,用来触发中断通知前端虚拟CPU
queue_evt: EventFd, // virtio队列对应的io_event_fd,虚拟CPU通过它通知fc_vmm线程有请求待处理
...
}
impl BlockEpollHandler {
fn process_queue(&mut self, queue_index: usize) -> bool { // 实现virtio抽象原理中的第二步和第三步
let queue = &mut self.queues(queue_index); // queue代表queue_index索引的virtio队列
let mut used_any = false; // used_any代表是否成功处理请求
while let some(head) = queue.pop(&self.mem) { // 第二步,取出IO请求;每个请求对应由三项Descriptor
// 组成的链表(DescriptorChain),链表头部位于head中
let len;
match Request::parse(&head, &self.mem) { // 由链表头部head开始,对请求进行解析,解析后获得完整
// 请求信息并将其保存到request对象中
Ok(request) => {
...
let status = match request.execute( // 根据request对象中的请求信息进行实际的IO处理,例如针对
// 读请求,将从后端文件中读取实际数据到内存指定位置中。
// 该函数为同步操作,当读/写操作完成后,结果才会返回到status中
&mut self.disk_image,
self.disk_nsectors,
&self.mem,
&self.disk_image_id,
){
Ok(l) => {
len = l;
VIRTIO_BLK_S_OK
}
...
};
self.mem // 将实际执行结果status填写到IO请求在虚拟机内存中的status字段
.write_obj_at_addr(status, request.status_addr)
.unwrap();
}
...
}
queue.add_used(&self.mem, head.index, len); // 第三步,放入IO响应
used_any = true; // used_any赋值为true,代表成功处理请求
}
used_any
}
fn signal_used_queue(&self) -> result::Result<(), DeviceError> { // 成功处理请求后以中断方式通知前端虚拟CPU
...
self.interrupt_evt.write(1).map_err(...) // 通过写irq_fd借助KVM模块触发虚拟中断
}
}
我们继续深入看一下virtio队列结构相关代码:
firecracker/devices/src/virtio/queue.rs:
pub struct Queue { // firecracker实现的virtio环形队列结构
max_size: u16, // 设备提供的最大队列长度
pub size: u16, // 前端驱动设置的最大队列长度,小于max_size
pub ready: bool, // 队列是否已经配置完成
pub desc_table: GuestAddress, // Descriptor Table段在虚拟机内存中的起始地址
pub avail_ring: GuestAddress, // Avail Queue段在虚拟机内存中的起始地址
pub used_ring: GuestAddress, // Used Queue段在虚拟机内存中的起始地址
next_avail: Wrapping<u16>, // 设备可见的last_avail值
next_used: Wrapping<u16>, // 下一个将填入的used entry索引
}
impl Queue {
…
pub fn pop<'a, 'b>(&'a mut self, mem: &'b GuestMemory) -> Option<DescriptorChain<'b>> {
if self.len(mem) == 0 { // len会计算Avail Queue的idx和last_avail的差值,
// 如果为零,代表没有待处理的请求
return None;
}
let index_offset = 4 + 2 * (self.next_avail.0 % self.actual_size()); // 计算last_avail指向的entry项在Avail Queue中的偏移
let desc_index: u16 = mem // 根据偏移读取entry的内容,即请求对应的首个Descriptor索引
.read_obj_from_addr(self.avail_ring.unchecked_add(usize::from(index_offset)))
.unwrap();
DescriptorChain::checked_new(mem, self.desc_table, self.actual_size(), desc_index).map( // 根据首个Descriptor索引找到完整的DescriptorChain
|dc| {
self.next_avail += Wrapping(1); // last_avail值递增
dc
},
)
}
…
}
pub struct DescriptorChain<'a> { // 每个IO请求对应一个DescriptorChain,含多个Descriptor。
// 结构定义中的'a为Rust语言针对引用使用的生命周期注解,用
// 来显式声明引用变量指向对象的作用域范围。这里主要说明
// DescriptorChain对象的作用域应当大于或等于mem的作用域。
mem: &'a GuestMemory, // 对虚拟机内存对象的引用
desc_table: GuestAddress, // Descriptor Table在虚拟机内存中的起始地址
queue_size: u16, // 队列长度
ttl: u16, // chain链表长度
pub index: u16, // DescriptorChain中当前Descptor的索引,可通过next_descriptor()更新
pub addr: GuestAddress, // 当前Descriptor的addr字段
pub len: u32, // 当前Descriptor的len字段
pub flags: u16, // 当前Descriptor的flags字段
pub next: u16, // 当前Descriptor的next字段
}
impl<'a> DescriptorChain<'a> {
fn checked_new( // 根据index索引创建一个新的DescriptorChain
mem: &GuestMemory,
desc_table: GuestAddress,
queue_size: u16,
index: u16,
) -> Option<DescriptorChain> {
if index >= queue_size { // 如果索引值大于队列长度,说明索引值无效
return None;
}
let desc_head = match mem.checked_offset(desc_table, (index as usize) * 16) { // 判断索引位置是否在有效的虚拟机内存区间内
Some(a) => a,
None => return None,
};
mem.checked_offset(desc_head, 16)?; // 判断整个Descriptor(16字段)是否在有效的虚拟机内存区间内
let desc = match mem.read_obj_from_addr::<Descriptor>(desc_head) { // 从内存中读取Descriptor内容
Ok(ret) => ret,
…
};
let chain = DescriptorChain {
mem,
desc_table,
queue_size,
ttl: queue_size,
index,
addr: GuestAddress(desc.addr as usize),
len: desc.len,
flags: desc.flags,
next: desc.next,
};
if chain.is_valid() {
Some(chain)
} else {
None
}
}
…
}
firecracker/devices/src/virtio/block.rs:
struct Request { // 该结构描述一个virtio-blk请求,可参考前面数据结构部分的介绍
request_type: RequestType, // 请求类型,如读、写、flush等
sector: u64, // 请求访问的起始扇区
data_addr: GuestAddress, // 数据区在虚拟机内存中的起始地址
data_len: u32, // 数据区的长度
status_addr: GuestAddress, // 存放请求处理结果的status内存地址
}
impl Request {
fn parse(avail_desc: &DescriptorChain, mem: &GuestMemory) -> result::Result<Request, Error> { // 从DescriptorChain中解析出完整的请求信息
…
let mut req = Request {
request_type: request_type(&mem, avail_desc.addr)?, // 先从DescriptorChain的第一项即请求的head段中解析出操作类型
sector: sector(&mem, avail_desc.addr)?, // 和访问起始扇区
data_addr: GuestAddress(0),
data_len: 0,
status_addr: GuestAddress(0),
};
let data_desc;
let status_desc;
let desc = avail_desc // desc指向链表的第二个Descriptor
.next_descriptor()
.ok_or(Error::DescriptorChainTooShort)?;
if !desc.has_next() { // 如果链表只有两项,
status_desc = desc; // 说明第二项是status段的Descriptor,
// Only flush requests are allowed to skip the data descriptor.
if req.request_type != RequestType::Flush { // 且请求类型为flush。该类型可以不带数据段
return Err(Error::DescriptorChainTooShort);
}
} else { // 否则,
data_desc = desc; // 第二项desc代表数据段Descriptor,
status_desc = data_desc // 下一项(即第三项)代表结果段Descriptor
.next_descriptor()
.ok_or(Error::DescriptorChainTooShort)?;
…
req.data_addr = data_desc.addr; // 将数据段Descriptor中的地址填入req中
req.data_len = data_desc.len; // 将数据段Descriptor中的长度填入req中
}
…
req.status_addr = status_desc.addr; // 将结果段Descriptor中的地址填入req中
Ok(req)
}
fn execute<T: Seek + Read + Write>( // 处理请求
&self,
disk: &mut T,
disk_nsectors: u64,
mem: &GuestMemory,
disk_id: &Vec<u8>,
) -> result::Result<u32, ExecuteError> {
…
disk.seek(SeekFrom::Start(self.sector << SECTOR_SHIFT)) // 将文件偏移到请求指定的扇区位置
.map_err(ExecuteError::Seek)?;
match self.request_type {
RequestType::In => { // 对于读请求,读取文件内容到指定内存位置
mem.read_to_memory(self.data_addr, disk, self.data_len as usize)
.map_err(ExecuteError::Read)?;
…
return Ok(self.data_len);
}
RequestType::Out => { // 对于写请求,从指定内存处将数据写入到文件中
mem.write_from_memory(self.data_addr, disk, self.data_len as usize)
.map_err(ExecuteError::Write)?;
…
}
…
};
Ok(0)
}
}
初始化流程与mmio总线机制
在讨论完virtio运行时原理后,我们再来分析一下初始化流程。它与virtio底层所采用的总线协议是强相关的,因此我们也会讨论总线机制的实现。整个初始化流程又可分为virtio设备自身初始化以及前端虚拟CPU与后端设备的协商过程两个部分。
一、设备自身初始化
firecracker采用了一种针对虚拟化的简单总线协议-mmio作为实现virtio的基础。mmio总线预留了0xD000000~0xFFFFFFFF的地址空间作为所有mmio设备的配置空间,并使用5~15号irq作为所有mmio设备可使用的中断号;每个mmio设备通过虚拟机内核启动时的命令行参数来上报设备资源信息(如配置空间地址范围和使用的中断号),这是一种静态的设备发现机制,它不像PCI设备的总线枚举机制那么灵活,因此不支持设备热插拔等高级特性。
firecracker中定义一个全局对象MMIODeviceManager来管理所有mmio设备,virtio-mmio设备的初始化通过register_virtio_device函数进行:
pub struct MMIODeviceManager {
pub bus: devices::Bus, // mmio总线对象,内部通过BTree来组织所有mmio设备对象
guest_mem: GuestMemory, // 虚拟机内存对象
mmio_base: u64, // mmio总线配空间起始地址,X86架构下为0xD0000000
irq: u32, // mmio总线中断资源起始编号,X86架构下为5
last_irq: u32, // mmio总线中断资源结束编号,X86架构下为15
id_to_dev_info: HashMap<(DeviceType, String), MMIODeviceInfo>, // 记录设备信息的哈希表
}
impl MMIODeviceManager {
…
pub fn register_virtio_device( // 注册一个新的virito-mmio设备
&mut self, // MMIODeviceManager对象
vm: &VmFd, // KVM虚拟机对象
device: Box<devices::virtio::VirtioDevice>, // virtio设备对象,注意virtio设备对象是包含在virito-mmio对象中的
cmdline: &mut kernel_cmdline::Cmdline, // 虚拟机内核启动参数
type_id: u32, // virtio设备对象类别,例如TYPE_BLOCK代表virtio-blk设备
device_id: &str, // virtio设备对象ID
) -> Result<u64> {
…
let mmio_device = devices::virtio::MmioDevice::new(self.guest_mem.clone(), device) // 根据virtio设备对象创建virtio-mmio对象,后续将深入分析
.map_err(Error::CreateMmioDevice)?;
for (i, queue_evt) in mmio_device.queue_evts().iter().enumerate() { // 为每个virtio队列向KVM内核注册io_event_fd,它是KVM向
// 用户态VMM程序提供的一种事件通知机制
let io_addr = IoEventAddress::Mmio(
self.mmio_base + u64::from(devices::virtio::NOTIFY_REG_OFFSET), // self.mmio_base为分配给当前mmio设备的mmio配置空间的起
// 始地址。从起始位置偏移NOTIFY_REG_OFFSET是虚拟CPU
// 向后端的通知地址,真正通知过程中CPU会向该地址写入
// 队列号
);
vm.register_ioevent(queue_evt.as_raw_fd(), &io_addr, i as u32) // 向KVM注册io_event_fd,传入队列eventfd、通知地址、写入
// 内容。当虚拟CPU向该地址写入确定内容时,KVM就触发
// 对eventfd的写操作,进而唤醒等待该eventfd的处理线程
.map_err(Error::RegisterIoEvent)?;
}
if let Some(interrupt_evt) = mmio_device.interrupt_evt() {
vm.register_irqfd(interrupt_evt.as_raw_fd(), self.irq) // 向KVM注册irqfd,这是反向由后端给前端CPU发送中断通知,
.map_err(Error::RegisterIrqFd)?; // 后端只需要往irqfd中写入数据,就会通过KVM向前端发中断
}
self.bus // 向mmio总线中添加当前mmio设备
.insert(Arc::new(Mutex::new(mmio_device)), self.mmio_base, MMIO_LEN) // 以配置空间作为BTree的Key索引,MMIO_LEN为4K
.map_err(Error::BusError)?;
#[cfg(target_arch = "x86_64")]
cmdline // 向虚拟机内核启动命令行中插入字段,便于前端发现设备
.insert(
"virtio_mmio.device", // virtio_mmio.device代表virtio-mmio设备对象
&format!("{}K@0x{:08x}:{}", MMIO_LEN / 1024, self.mmio_base, self.irq), // 设备资源信息,例如第一个设备为"4K@0xD0000000:5",
// 含议为配置空间从0xD0000000开始,长度4K,中断irq号为5
)
.map_err(Error::Cmdline)?;
let ret = self.mmio_base;
self.id_to_dev_info.insert( // 向哈希表中记录当前设备信息
(DeviceType::Virtio(type_id), device_id.to_string()),
MMIODeviceInfo {
addr: ret,
len: MMIO_LEN,
irq: self.irq,
},
);
self.mmio_base += MMIO_LEN; // 将mmio_base加上4K,表明当前设备占用4K
self.irq += 1; // 将中断irq号加1,表明当前设备占用1个irq
Ok(ret)
}
}
通过上述代码,我们看到MMIODeviceManager对象在注册设备过程中使用了几个核心概念:devices:;Bus、devices::virtio::VirtioDevice、 devices::virtio::MmioDevice。这些类型包含在firecracker的一个名为devices的子模块中,它是firecracker对设备模型概念的抽象与实现,下面我们深入分析一下该模块。
首先firecracker的设备模型中定义了总线和设备两个抽象概念,它们在Rust中的实现如下:
firecracker/devices/src/bus.sr:
pub struct Bus { // 总线下的设备以BTree组织
devices: BTreeMap<BusRange, Arc<Mutex<BusDevice>>>, // 以设备配置空间范围BusRange作为BTree的Key索引
}
impl Bus {
pub fn new() -> Bus {
Bus {
devices: BTreeMap::new(),
}
}
pub fn insert(&mut self, device: Arc<Mutex<BusDevice>>, base: u64, len: u64) -> Result<()> {
…
}
pub fn read(&self, addr: u64, data: &mut [u8]) -> bool { // 对总线地址的读操作(通常由CPU发起,回顾前文对CPU运行时介绍),
if let Some((offset, dev)) = self.get_device(addr) { // 会转换成对总线上对就设备的读操作(使用相对偏移)
dev.lock()
.expect("Failed to acquire device lock")
.read(offset, data);
true
} else {
false
}
}
pub fn write(&self, addr: u64, data: &[u8]) -> bool { // 对总线地址的写操作
if let Some((offset, dev)) = self.get_device(addr) {
dev.lock()
.expect("Failed to acquire device lock")
.write(offset, data);
true
} else {
false
}
}
}
pub trait BusDevice: AsAny + Send { // 总线上的设备被定义成一个trait,包括一组公共的操作
fn read(&mut self, offset: u64, data: &mut [u8]) {} // 设备内的读操作,向上对接总线上的读操作
fn write(&mut self, offset: u64, data: &[u8]) {} // 设备内的写操作,向上对接总线上的写操作
fn interrupt(&self, irq_mask: u32) {} // 设备触发中断
}
基于抽象的总线和设备概念,virtio-mmio设备是对设备概念的扩展,是一种具体的设备实现方式:
firecracker/devices/src/virtio/mmio.rs:
pub struct MmioDevice {
device: Box<VirtioDevice>, // 包含的virtio设备对象,该对象实现VirtioDevice这个trait
device_activated: bool, // 设备是否被激活,即完成与前端的握手
…
queue_select: u32, // 队列选择器,代表当前要操作的队列
…
interrupt_evt: Option<EventFd>, // 中断eventfd,如前文述将传递给KVM作为irqfd
driver_status: u32, // 前端驱动状态
…
queues: Vec<Queue>, // 队列数组
queue_evts: Vec<EventFd>, // 队列eventfd数组,将传递给KVM作为io_event_fd
mem: Option<GuestMemory>, // 虚拟机内存对象
}
impl MmioDevice {
pub fn new(mem: GuestMemory, device: Box<VirtioDevice>) -> std::io::Result<MmioDevice> {
let mut queue_evts = Vec::new();
for _ in device.queue_max_sizes().iter() { // 根据virtio设备的队列数来生成队列eventfd数组
queue_evts.push(EventFd::new()?)
}
let queues = device // 生成队列数组
.queue_max_sizes()
.iter()
.map(|&s| Queue::new(s))
.collect();
Ok(MmioDevice {
device,
device_activated: false,
…
queue_select: 0,
…
interrupt_evt: Some(EventFd::new()?),
driver_status: DEVICE_INIT,
…
queues,
queue_evts,
mem: Some(mem),
})
}
}
impl BusDevice for MmioDevice { // MmioDevice作为BusDevice的扩展,内部实现了对virtio的操作
// 我们将在下节前后端协商部分分析这部分内容
fn read(&mut self, offset: u64, data: &mut [u8]) {
…
}
fn write(&mut self, offset: u64, data: &[u8]) {
…
}
fn interrupt(&self, irq_mask: u32) {
…
}
}
pub trait VirtioDevice: Send { // VirtioDevice定义了所有virtio设备都需要实现的公共接口,
// 请参考接口上方的描述文档
/// The virtio device type.
fn device_type(&self) -> u32;
/// The maximum size of each queue that this device supports.
fn queue_max_sizes(&self) -> &[u16];
/// The set of feature bits shifted by `page * 32`.
fn features(&self, page: u32) -> u32 {
let _ = page;
0
}
/// Acknowledges that this set of features should be enabled.
fn ack_features(&mut self, page: u32, value: u32);
/// Reads this device configuration space at `offset`.
fn read_config(&self, offset: u64, data: &mut [u8]);
/// Writes to this device configuration space at `offset`.
fn write_config(&mut self, offset: u64, data: &[u8]);
/// Activates this device for real usage.
fn activate(
&mut self,
mem: GuestMemory,
interrupt_evt: EventFd,
status: Arc<AtomicUsize>,
queues: Vec<Queue>,
queue_evts: Vec<EventFd>,
) -> ActivateResult;
/// Optionally deactivates this device and returns ownership of the guest memory map, interrupt
/// event, and queue events.
fn reset(&mut self) -> Option<(EventFd, Vec<EventFd>)> {
None
}
}
virtio-blk设备作一virito设备的一种类型,它将扩展VirtioDevice,并实现VritioDevice定义的接口:
firecracker/devices/src/virtio/block.rs:
pub struct Block { // virtio-blk设备
disk_image: Option<File>, // 后端文件
disk_nsectors: u64, // 块设备大小
…
config_space: Vec<u8>, // blk配置空间,对前端呈现块设备大小、队列数等
epoll_config: EpollConfig, // 向epoll事件循环框架传递处理对象
…
}
impl VirtioDevice for Block { // 实现VirtioDevice定义的公共接口,这里仅举了两个例子
fn device_type(&self) -> u32 { // 返回设备类型为TYPE_BLOCK
TYPE_BLOCK
}
fn queue_max_sizes(&self) -> &[u16] { //返回每个队列最大长度,这里只有一个队列且长度为256
QUEUE_SIZES
}
…
}
二、前后端协商(握手)
上节讲述了firecracker后端如何初始化一个virtio-mmio设备,本节将讨论前后端的协商流程。
虚拟机内部系统通过内核命令行参数识别virtio-mmio设备并调用对应的驱动函数对设备进行驱动。通过命令行参数(如virtio-mmio.device 4K@0xD0000000:5),前端系统可知配置空间地址范围(如0xD0000000~0xD0000FFF)和中断资源(如irq为5),接着便可以通过读写配置空间与设备进行协商操作。Virtio-mmio设备的配置空间概览如下:
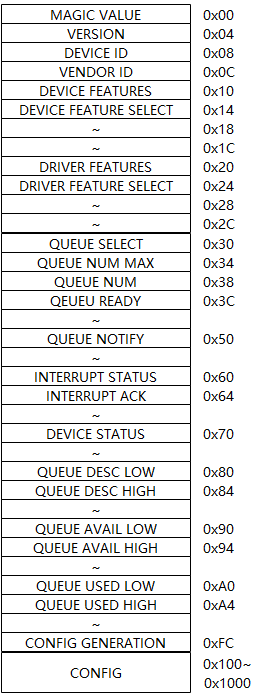
前端通过配置空间中的DEVICE ID可以获知具体的设备类别(例如virtio-blk的ID为2),并通过DEVICE FEATURE和DRIVER FEATURE与后端进行特性协商。此后最为重要的动作便是为VIRTIO环形队列申请内存,并将内存地址填入到配置空间相应字段中。最后向DEVICE STATUS中写入DRIVER OK告诉后端驱动初始化完成。
回顾前文对虚拟CPU原理的介绍,当CPU读写MMIO地址空间时将从Guest模式退出到firecracker中并调用mmio总线的读写函数进行处理。接着mmio总线的读写操作将转到地址对应的mmio设备中进行读写,我们深入代码来看一下mmio设备的读写操作:
firecracker/devices/src/virtio/mmio.rs:
impl BusDevice for MmioDevice {
fn read(&mut self, offset: u64, data: &mut [u8]) { // 大家可以对照上面的配置空间解析图来理解代码的含义
match offset {
0x00...0xff if data.len() == 4 => {
let v = match offset {
0x0 => MMIO_MAGIC_VALUE,
0x04 => MMIO_VERSION,
0x08 => self.device.device_type(),
0x0c => VENDOR_ID, // vendor id
0x10 => {
let mut features = self.device.features(self.features_select);
if self.features_select == 1 {
features |= 0x1; // enable support of VirtIO Version 1
}
features
}
0x34 => self.with_queue(0, |q| u32::from(q.get_max_size())),
0x44 => self.with_queue(0, |q| q.ready as u32),
0x60 => self.interrupt_status.load(Ordering::SeqCst) as u32,
0x70 => self.driver_status,
0xfc => self.config_generation,
_ => {
…
}
};
LittleEndian::write_u32(data, v);
}
0x100...0xfff => self.device.read_config(offset - 0x100, data),
_ => {
…
}
};
}
fn write(&mut self, offset: u64, data: &[u8]) {
fn hi(v: &mut GuestAddress, x: u32) {
*v = (*v & 0xffff_ffff) | (u64::from(x) << 32)
}
fn lo(v: &mut GuestAddress, x: u32) {
*v = (*v & !0xffff_ffff) | u64::from(x)
}
match offset {
0x00...0xff if data.len() == 4 => {
let v = LittleEndian::read_u32(data);
match offset {
0x14 => self.features_select = v,
0x20 => {
if self
.check_driver_status(DEVICE_DRIVER, DEVICE_FEATURES_OK | DEVICE_FAILED)
{
self.device.ack_features(self.acked_features_select, v);
} else {
…
return;
}
}
0x24 => self.acked_features_select = v,
0x30 => self.queue_select = v,
0x38 => self.update_queue_field(|q| q.size = v as u16),
0x44 => self.update_queue_field(|q| q.ready = v == 1),
0x64 => {
if self.check_driver_status(DEVICE_DRIVER_OK, 0) {
self.interrupt_status
.fetch_and(!(v as usize), Ordering::SeqCst);
}
}
0x70 => self.update_driver_status(v), // 更新设备状态,需要进一步打开
0x80 => self.update_queue_field(|q| lo(&mut q.desc_table, v)),
0x84 => self.update_queue_field(|q| hi(&mut q.desc_table, v)),
0x90 => self.update_queue_field(|q| lo(&mut q.avail_ring, v)),
0x94 => self.update_queue_field(|q| hi(&mut q.avail_ring, v)),
0xa0 => self.update_queue_field(|q| lo(&mut q.used_ring, v)),
0xa4 => self.update_queue_field(|q| hi(&mut q.used_ring, v)),
_ => {
…
return;
}
}
}
0x100...0xfff => {
if self.check_driver_status(DEVICE_DRIVER, DEVICE_FAILED) {
self.device.write_config(offset - 0x100, data)
} else {
…
return;
}
}
_ => {
…
return;
}
}
}
}
当前端更新设备状态为DRIVER OK时,后端将配合执行设备激活动作,下面仍以virito-blk为例进行分析:
firecracker/devices/src/virtio/mmio.rs:
fn update_driver_status(&mut self, v: u32) {
match !self.driver_status & v {
…
DEVICE_DRIVER_OK
if self.driver_status
== (DEVICE_ACKNOWLEDGE | DEVICE_DRIVER | DEVICE_FEATURES_OK) =>
{
self.driver_status = v;
if !self.device_activated && self.are_queues_valid() {
if let Some(ref interrupt_evt) = self.interrupt_evt {
if let Some(mem) = self.mem.take() {
self.device
.activate(
mem,
interrupt_evt.try_clone().expect("Failed to clone eventfd"),
self.interrupt_status.clone(),
self.queues.clone(),
self.queue_evts.split_off(0),
)
.expect("Failed to activate device");
self.device_activated = true;
}
}
}
}
…
}
}
firecracker/devices/src/virtio/block.rs:
fn activate( // 激活virtio-blk设备
&mut self,
mem: GuestMemory, // 虚拟机内存对象
interrupt_evt: EventFd, // 中断irqfd,用来触发虚拟中断通知前端
…
queues: Vec<Queue>, // virtio队列,这里实际只有一个
mut queue_evts: Vec<EventFd>, // virtio队列的io_event_fd,供前端通知后端
) -> ActivateResult {
…
if let Some(disk_image) = self.disk_image.take() {
let queue_evt = queue_evts.remove(0);
let queue_evt_raw_fd = queue_evt.as_raw_fd();
…
let handler = BlockEpollHandler { // 构建一个BlockEpollHandler对象,参考前文运行时代码解析
queues,
mem,
disk_image,
disk_nsectors: self.disk_nsectors,
…
interrupt_evt,
queue_evt,
…
};
self.epoll_config // 注意,整个激活动作是在vCPU线程上下文执行的,BlockEpollHandler
.sender // 对象也在vCPU线程构建,但是BlockEopllHanler是在fc_vmm线程中被
.send(Box::new(handler)) // 调用的,这样做的好处是可以减少vCPU退出时间。因此这里要把
.expect("Failed to send through the channel"); // BlockEpollHandler对象通过channel发送给fc_vmm线程
epoll::ctl( // 向fc_vmm线程中的epoll事件循环框架添加队列的eventfd,这样当前端
self.epoll_config.epoll_raw_fd, // 借助KVM的io_event_fd便可以唤醒fc_vmm线程。fc_vmm线程首次处理队
epoll::ControlOptions::EPOLL_CTL_ADD, // 列事件时会从channel中读出BlockEpollHandler对象,并调用handle_event
queue_evt_raw_fd, // 函数处理队列请求;后续处理事件,fc_vmm线程可直接使用该对象
epoll::Event::new(epoll::Events::EPOLLIN, self.epoll_config.q_avail_token),
)
.map_err(...)?;
…
return Ok(());
}
至此,我们已经完成对firecracker中的virtio-mmio设备设计和实现思路(以virtio-blk为例,virtio-net实现本质是相同)的分析,这部分是firecracker中实现最复杂的部分,但是相比传统qemu-kvm中virtio-pci实现,已经作了大量精简。从运行时同步IO操作的实现方式可以看出firecracker的IO性能是非常糟糕的,相同队列并不支持IO的并行处理。不过,在serverless轻量化的场景中,系统中可能会存在成千上万的firecracker实例,单个实例具备非常高的IO性能并没有多大意义,因为此时整个系统IO吞吐量已经成为瓶颈。但是如果想把firecracker应用到通用虚拟化场景中,那对IO系统的改造将是一个大工程。
转载请注明:吴斌的博客 » 【firecracker】virtio-mmio设备